

RESEARCH | 2024
Cost Effective Fault Detection on Solar Panel using YOLO
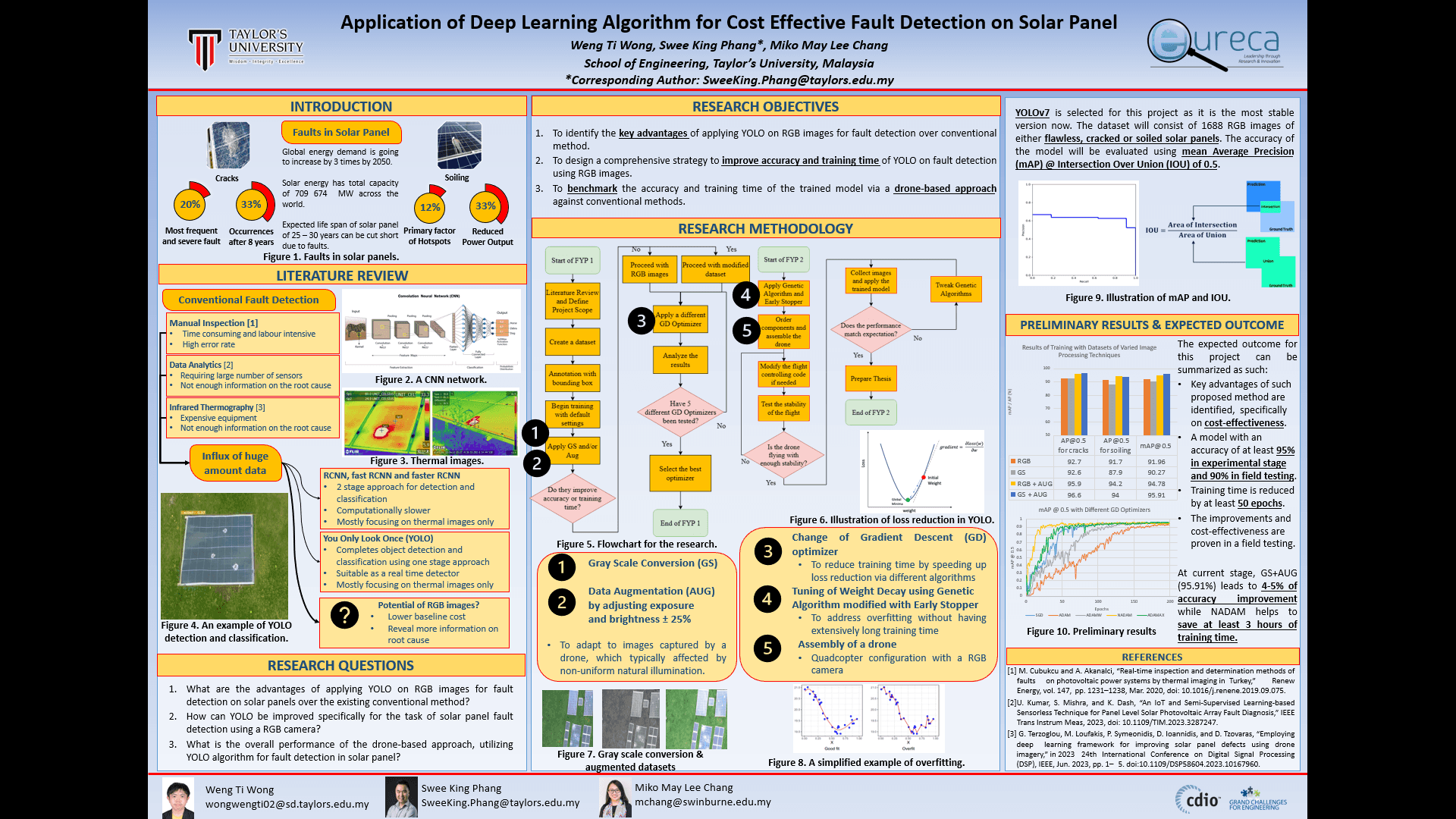
A peer-reviewed research project that replaced expensive thermal cameras with a standard drone RGB camera for solar panel fault detection, achieving 95.91% accuracy through optimised YOLOv7 training techniques. The results are published in IEEE GECOST, JESTEC journal, and a book chapter.
OVERVIEW
IMPLEMENTATION
TECH STACK
Language
Python
Model
YOLOv7
Data management
Roboflow
Annotation
LabelImg
Hardware
NVIDIA RTX 3060
Data collection
DJI Mavic 3 Classic
FEATURES
Automated detection and classification of cracks and soiling at 95.91% accuracy
Drone-based RGB image collection without requiring expensive thermal camera
Grayscale conversion and brightness/exposure augmentation pipeline
Nadam optimizer reducing training convergence from 175 to 25 epochs
ReLU activation function lowering GPU RAM usage from 5.94 GB to 4.87 GB
Genetic Algorithm with Early Stopper (GAES) cutting hyperparameter tuning by 30.78 days
Field tested at 2m, 4m, and 6m above a real 1,756-panel rooftop solar system
Published in IEEE GECOST, JESTEC journal, and a book chapter
CHALLENGES & SOLUTIONS
Complex background of RGB images degrading detection accuracy
Applied grayscale conversion to strip redundant colour information from RGB images, simplifying background complexity. Since both cracks and soiling appear in white tones, colour is non-informative. Combined with brightness and exposure augmentation at ±25%, this improved mAP@0.5 by ~4% and accelerated convergence by 75 epochs compared to training on raw RGB data.
Small, self-collected dataset with limited variety
Used Roboflow to apply data augmentation — artificially doubling the training dataset size by adjusting brightness and exposure within ±25% — preparing the model to handle outdoor lighting interferences such as uneven illumination and glare from drone-captured imagery.
Excessive training and hyperparameter tuning time
Benchmarked 5 gradient descent optimizers and 7 activation functions, identifying Nadam and ReLU as the best combination. This cut convergence from 175 to 25 epochs, saving 312.5 minutes per training run and reducing RAM usage from 5.94 GB to 4.87 GB. A custom Genetic Algorithm with Early Stopper (GAES) then reduced full hyperparameter tuning time from 52.08 to 21.3 days.
Dust in the soiling dataset degrading model performance
Investigated the soiling dataset and found coal dust is barely visible at drone height. Removed dust from the detection scope, which boosted soiling mAP by up to 20.1%.
Detection accuracy drop at higher drone flight altitudes
Conducted field tests at 2m, 4m, and 6m above Taylor's University's rooftop solar panels, quantifying the accuracy-coverage trade-off for each height. Recommended 2m (76% accuracy) for small systems and 6m for large-scale solar farms where broader coverage at 68% accuracy is an acceptable trade-off.
PUBLICATION
- 1. W. T. Wong, S. K. Phang, and A. Azman, "Fault Detection Using YOLOv7 on RGB Images of Solar Panels with Various Data Augmentation Techniques and an Enhanced Early Stopper," in International Conference on Internet of Things, 2023: Springer, pp. 90-104.
- 2. W. T. Wong and S. K. Phang, "Studies on Techniques to Improve YOLO in Fault Detection Using RGB Images of Solar Panels," in 2024 International Conference on Green Energy, Computing and Sustainable Technology (GECOST), 2024: IEEE, pp. 164-168.
- 3. W. T. Wong, S. K. Phang, W. L. Pang, and R. Lalitha, "Intelligent System in Action: Automated Fault Detection of Solar Panels Using Drones and YOLOv7," in Intelligent Systems of Computing and Informatics in Sustainable Urban Development: CRC Press, 2025, pp. 59-76.
- 4. W. T. WONG, S. K. PHANG, M. M. L. CHANG, and K. S. EU, "APPLICATION OF DEEP LEARNING ALGORITHM FOR COST EFFECTIVE FAULT DETECTION ON SOLAR PANEL," 2025.
- 5. W. T. Wong, S. K. Phang, N. Sariff, H. S. Husin, and B. J. Pandian, "Enhanced Fault Detection for Solar Panels with YOLOv7 on RGB Images Using Augmentation Strategies and an Early Stopper," Artificial Intelligence in Instrumentation, Control and Automation, pp. 503-520, 2026.