UNIVERSITY PROJECT | 2024
Intelligent Road Safety Monitoring System
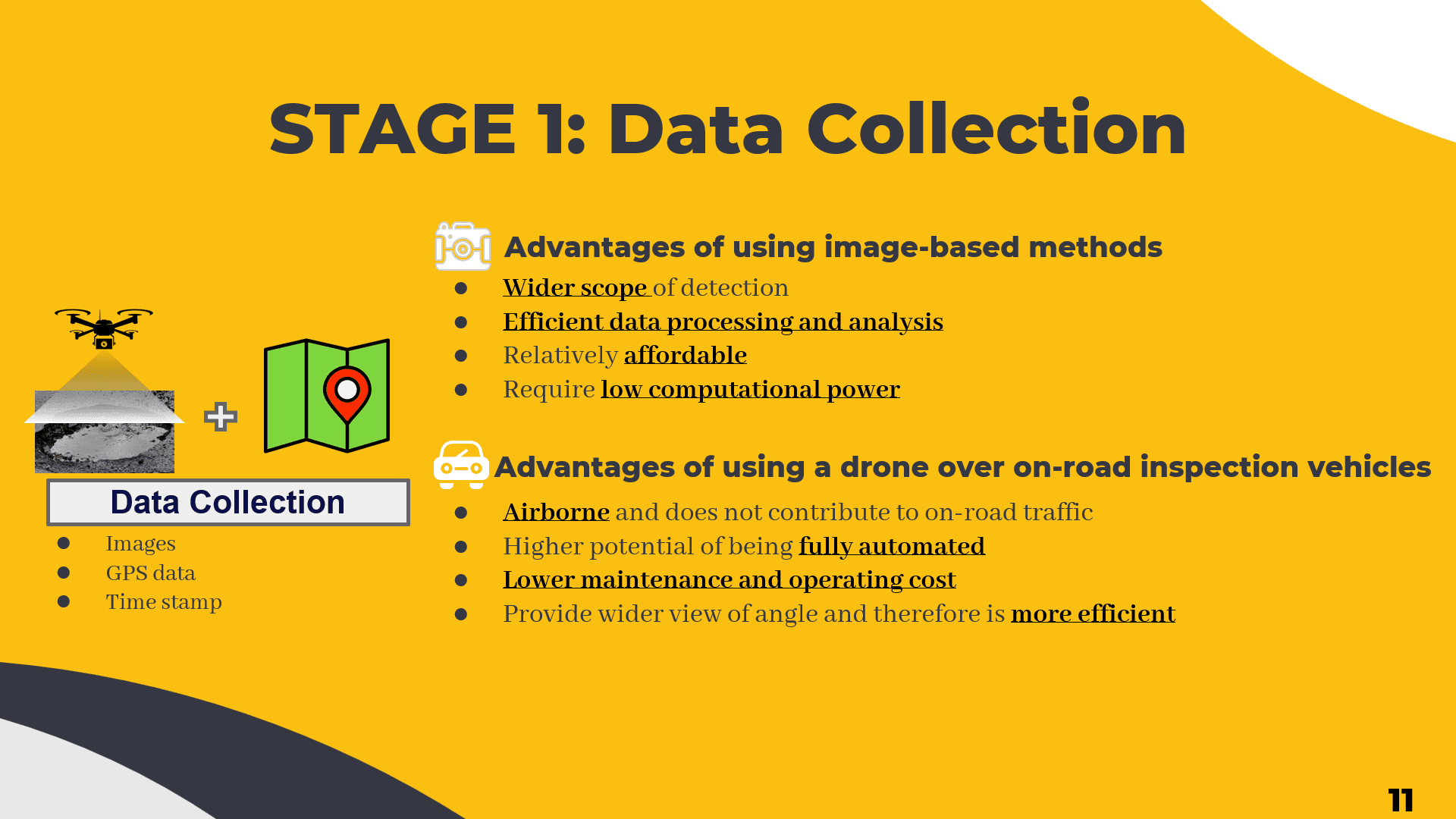
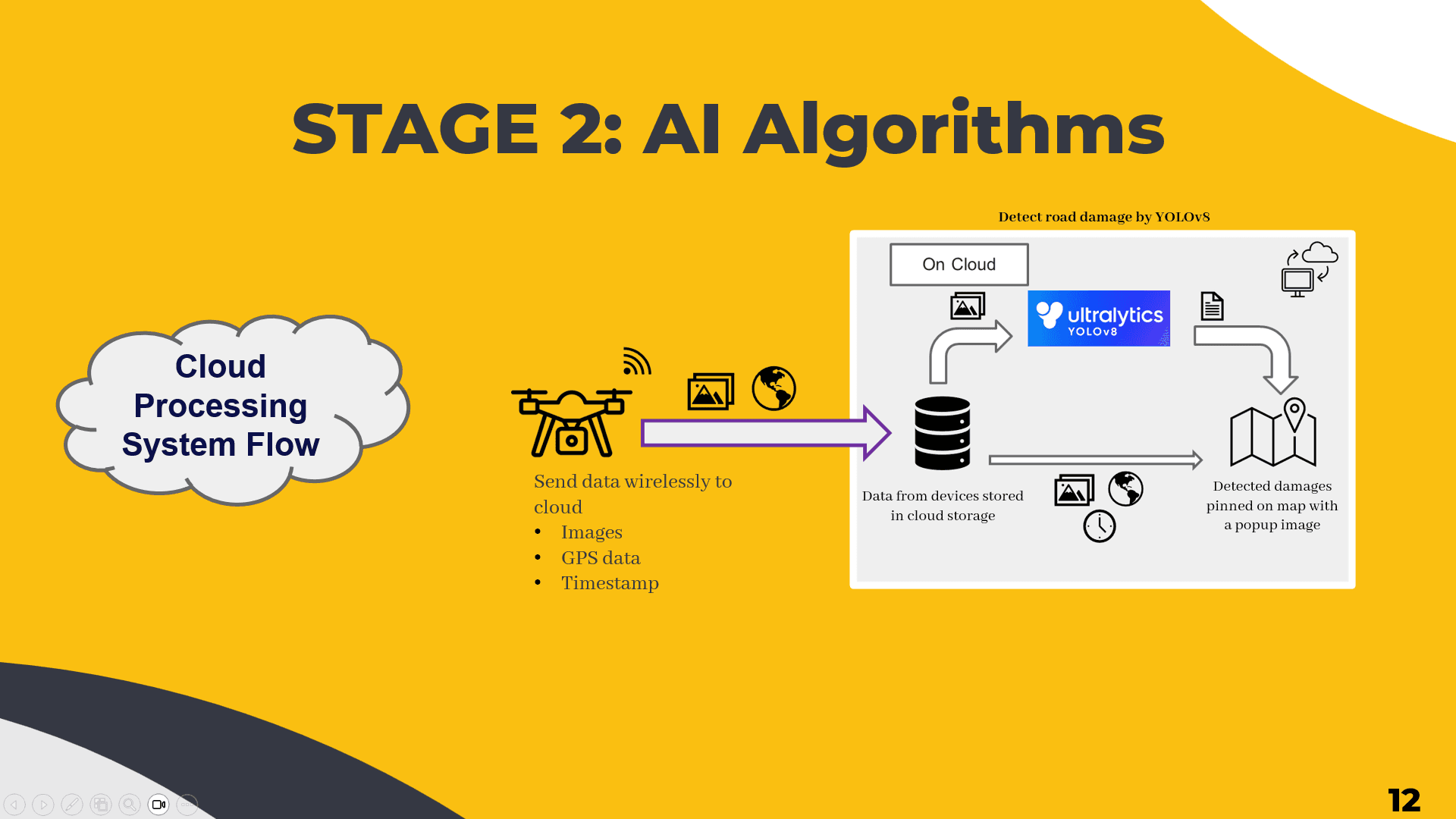
A drone-based road defect detection system that deploys a UAV to autonomously survey roads, uses YOLOv8 to classify potholes, cracks, manholes, and blurred markings, then pins every finding onto an interactive map — giving both road authorities and commuters real-time awareness of hazards before they cause accidents.
OVERVIEW
IMPLEMENTATION
TECH STACK
Drone
DJI Air 3
MlModel
finetuned YOLOv8
Language
Python
Libraries
Pillow (PIL), Folium, OS
Cloud
Google Drive, Google Colab (Nvidia Tesla T4 GPU)
Dataset
Road Damage Dataset (RDD) 2020
FEATURES
UAV aerial image capture with embedded GPS metadata at fixed time intervals
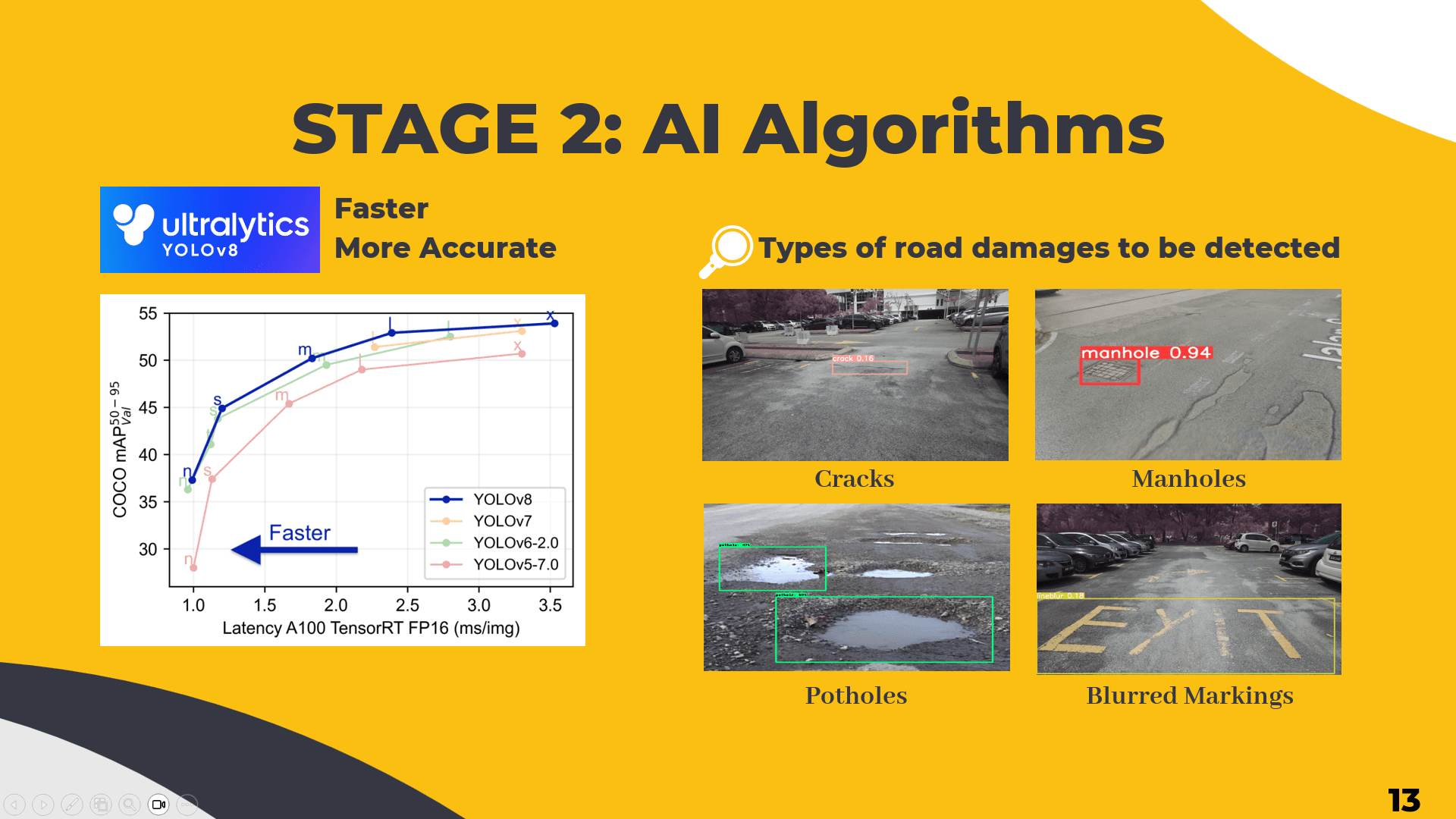
Automated YOLOv8 detection of 4 defect classes: potholes, cracks, manholes, and blurred road markings
GPS EXIF extraction and coordinate-based image renaming for traceability
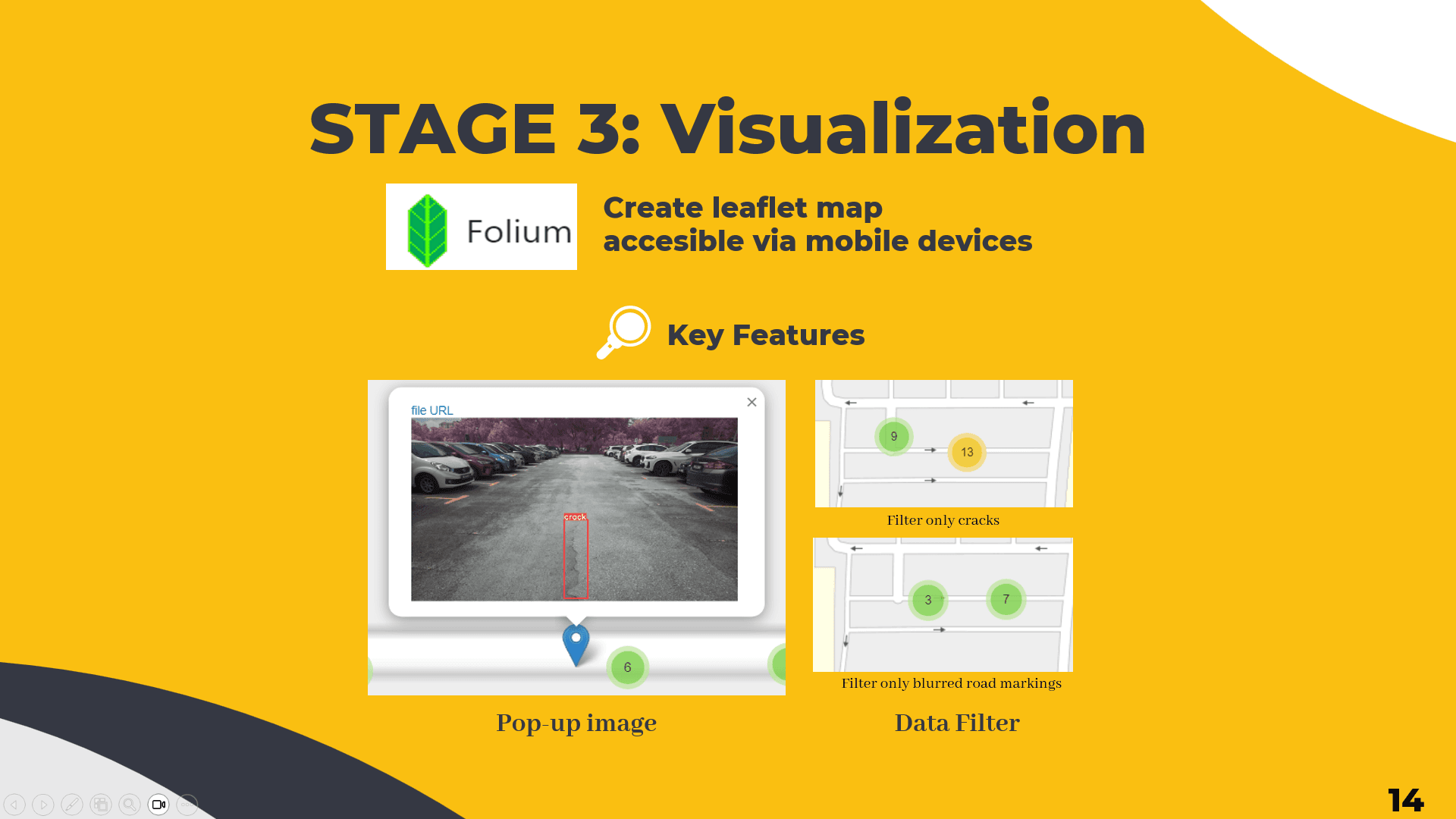
Interactive virtual map with geotagged defect markers and image previews via Folium
End-to-end cloud pipeline: DJI Fly App → Google Drive → Google Colab → HTML map
Dataset augmented with Malaysia-specific road defects for local accuracy
CHALLENGES & SOLUTIONS
Selecting the right detection model for drone-captured aerial imagery
Conducted a systematic literature review comparing YOLOv5, YOLOv7, YOLOv8, and RCNN variants across accuracy, inference speed, and suitability for real-time aerial detection. Selected YOLOv8 based on its leading mAP of 91.1% and lightweight inference time of 8.8ms per image while remaining compatible with Google Colab GPU resources.